131 1300 0010
<b id="0toem"><menuitem id="0toem"></menuitem></b>
<code id="0toem"><abbr id="0toem"></abbr></code>
<code id="0toem"></code>
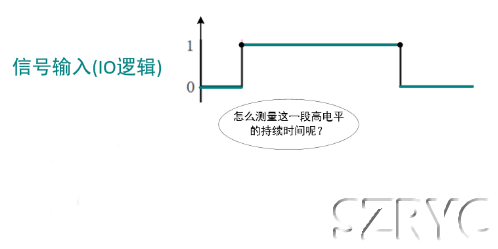
在單片機(jī)與嵌入式開發(fā)中,某些場景需要捕獲傳感器的高電平(或低電平)信號的持續(xù)時(shí)間,如紅外解碼信號、編碼器輸入信號等。
如下圖,以單一的一段高電平輸入信號為例,如何測量這段高電平的時(shí)間呢?
從直觀上理解,就是要不斷的檢測這個(gè)信號,當(dāng)信號從0變到1時(shí),記錄一個(gè)時(shí)間,再從1變到0時(shí),記錄另一個(gè)時(shí)間,兩個(gè)時(shí)間差就是高電平的持續(xù)時(shí)間了。那具體要怎么編程呢?這就要用到定時(shí)器了。
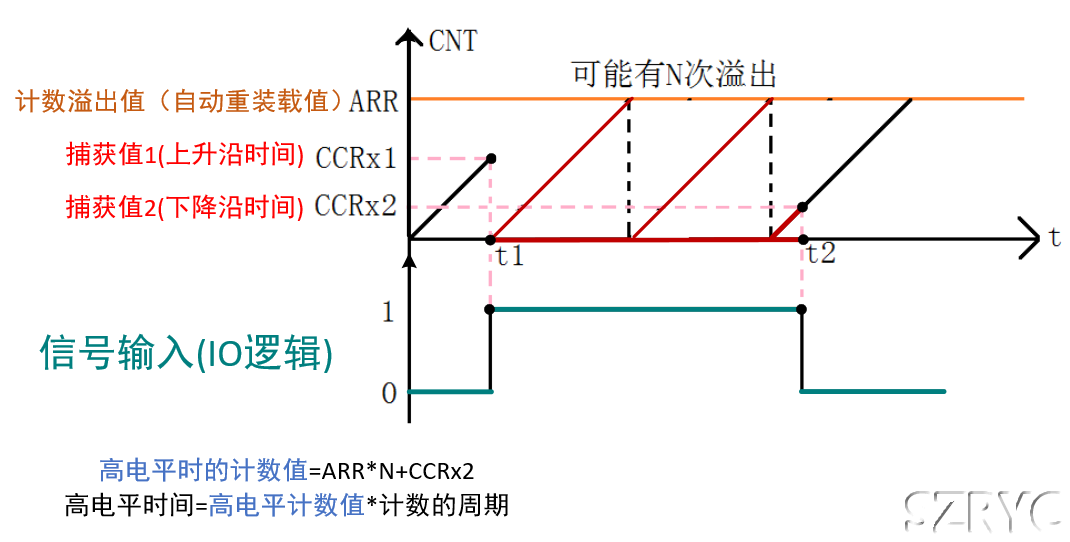
上篇介紹了定時(shí)器的輸出功能,本篇是利用定時(shí)器的輸入功能,來計(jì)算脈沖時(shí)長。如下圖:
定時(shí)器的CNT計(jì)數(shù)器在不停的計(jì)數(shù)
首先配置定時(shí)器的輸入通道為上升沿捕獲,這樣當(dāng)檢測到從0到1的跳變時(shí),CCR1就會先保存當(dāng)前的CNT值,同時(shí)CNT會清零重新開始計(jì)數(shù)
然后將定時(shí)器的輸入通道為下降沿捕獲,當(dāng)檢測從1到0的跳變時(shí),CCR2就會先保存當(dāng)前的CNT值
在這期間,CNT的計(jì)數(shù)值可能會溢出,這不影響,記錄下溢出的次數(shù),并重新開始計(jì)數(shù)即可
最終,t2-t1的高電平時(shí)間,就可以通過N次的溢出時(shí)間加CCR2保存的時(shí)間來計(jì)算獲得了
上篇介紹了定時(shí)器輸出PWM時(shí)用到的幾個(gè)寄存器(CR、CCMR、CNT、PSC、ARR、CCR等),這里再介紹幾個(gè)捕獲信號時(shí)需要用到的幾個(gè)寄存器:
CCMR寄存器上篇已有介紹,只是上篇僅介紹了輸出模式下的功能,本篇再介紹一下它在輸入模式下的功能:
這些通道可用于輸入(捕獲模式)或輸出(比較模式)模式。通道方向通過配置相應(yīng)的 CCxS 位進(jìn)行定義。此寄存器的所有其它位在輸入模式和輸出模式下的功能均不同。對于任一給定位
OCxx 用于說明通道配置為輸出時(shí)該位對應(yīng)的功能
ICxx 則用于說明通道配置為輸入時(shí) 該位對應(yīng)的功能
因此,必須注意同一個(gè)位在輸入階段和輸出階段具有不同的含義。

這里僅先介紹輸入模式下的功能:
位 15:12 IC2F:輸入捕獲 2 濾波器 (Input capture 2 filter)
位 11:10 IC2PSC[1:0]:輸入捕獲 2 預(yù)分頻器 (Input capture 2 prescaler)
位 9:8 CC2S:捕獲/比較 2 選擇 (Capture/compare 2 selection) 用法參照下面的CC1S通道1
位 7:4 IC1F:輸入捕獲 1 濾波器 (Input capture 1 filter)
數(shù)字濾波器由事件計(jì)數(shù)器組成,每 N 個(gè)事件才視為一個(gè)有效邊沿:
0000:無濾波器
0001~1111:其它頻率的濾波器
位 3:2 IC1PSC:輸入捕獲 1 預(yù)分頻器 (Input capture 1 prescaler)
此位域定義 CC1 輸入 (IC1) 的預(yù)分頻比。只要 CC1E=0(TIMx_CCER 寄存器),預(yù)分頻器便立即復(fù)位。
00:無預(yù)分頻器,捕獲輸入上每檢測到一個(gè)邊沿便執(zhí)行捕獲
01~11:每發(fā)生 2 (4、8)個(gè)事件便執(zhí)行一次捕獲
位 1:0 CC1S:捕獲/比較 1 選擇 (Capture/Compare 1 selection),此位域定義通道方向(輸入/輸出)以及所使用的輸入。
00:CC1 通道配置為輸出
01:CC1 通道配置為輸入,IC1 映射到 TI1 上
10:CC1 通道配置為輸入,IC1 映射到 TI2 上
11:CC1 通道配置為輸入,IC1 映射到 TRC 上。此模式僅在通過 TS 位(TIMx_SMCR 寄存器)選擇內(nèi)部觸發(fā)輸入時(shí)有效
注: 僅當(dāng)通道關(guān)閉時(shí)(TIMx_CCER 中的 CC1E = 0),才可向 CC1S 位寫入數(shù)據(jù)。
我們要用到這個(gè)寄存器的最低 2 位, CC1E 和 CC1P。

位 15、11、7、3 CCxNP:捕獲 /比較x 輸出極性 (Capture/Comparex output Polarity)。
CCx 通道配置為輸出: CCxNP 必須保持清零。
CCx 通道配置為輸入:此位與 CCxP 配合使用,用以定義 TI1FP1/TI2FP1 的極性。請參見 CCxP 說明。
位 14、10、6、2 保留,必須保持復(fù)位值。
位 13、9、5、1 CCxP:捕獲 /比較x 輸出極性 (Capture/Comparex output Polarity)。
00:非反相/上升沿觸發(fā) 電路對 TIxFP1 上升沿敏感 (在復(fù)位模式、外部時(shí)鐘模式或觸發(fā)模式下執(zhí)行捕獲或觸發(fā)操作), TIxFP1 未反相 (在門控模式或編碼器模式下執(zhí)行觸發(fā)操作)。
01:反相/下降沿觸發(fā) 電路對 TIxFP1 下降沿敏感 (在復(fù)位模式、外部時(shí)鐘模式或觸發(fā)模式下執(zhí)行捕獲或觸發(fā)操作), TIxFP1 反相 (在門控模式或編碼器模式下執(zhí)行觸發(fā)操作)。
10:保留,不使用此配置。
11:非反相/上升沿和下降沿均觸發(fā) 電路對 TIxFP1 上升沿和下降沿都敏感(在復(fù)位模式、外部時(shí)鐘模式或觸發(fā)模式下執(zhí)行捕獲或觸發(fā)操作),TIxFP1 未反相(在門控模式下執(zhí)行觸發(fā)操作)。編碼器模式下不得使用此配置。
0:OCx 高電平有效
1:OCx低電平有效
CCx 通道配置為輸出:
CCx 通道配置為輸入:
CCxNP/CCxP 位可針對觸發(fā)或捕獲操作選擇 TI1FP1 和 TI2FP1 的極性。
位 12、8、4、0 CCxE:捕獲 /比較 x 輸出使能 (Capture/Comparex output enable)。
0:禁止捕獲
1:使能捕獲
0:關(guān)閉––OCx 未激活
1:開啟––在相應(yīng)輸出引腳上輸出 OCx信號
CCx 通道配置為輸出:
CCx 通道配置為輸入:
此位決定了是否可以實(shí)際將計(jì)數(shù)器值捕獲到輸入捕獲/比較寄存器 1 (TIMx_CCR1) 中。
我們需要用到中斷來處理捕獲數(shù)據(jù),所以必須開啟通道 1 的捕獲比較中斷,即 CC1IE 設(shè)置為 1 。

位 15、13、7、5 保留,必須保持復(fù)位值。
位 14 TDE:觸發(fā) DMA 請求使能 (Trigger DMA request enable)
位 12~位9 CCxDE:捕獲/比較x DMA 請求使能 (Capture/Compare 1 DMA request enable)
位 8 UDE:更新 DMA 請求使能 (Update DMA request enable)
位 6 TIE:觸發(fā)信號(TRGI)中斷使能 (Trigger interrupt enable)
位 4~位1 CCxIE:捕獲/比較x 中斷使能 (Capture/Compare 1 interrupt enable)
位 0 UIE:更新中斷使能 (Update interrupt enable)
這里用到的是定時(shí)器5的通道1,根據(jù)STM32F407的數(shù)據(jù)手冊“3 Pinouts and pin description”中的“Table 9. Alternate function mapping”復(fù)用引腳說明表,可以看到定時(shí)器5通道1對應(yīng)的引腳位A0,所以使用A0作為信號的輸入引腳。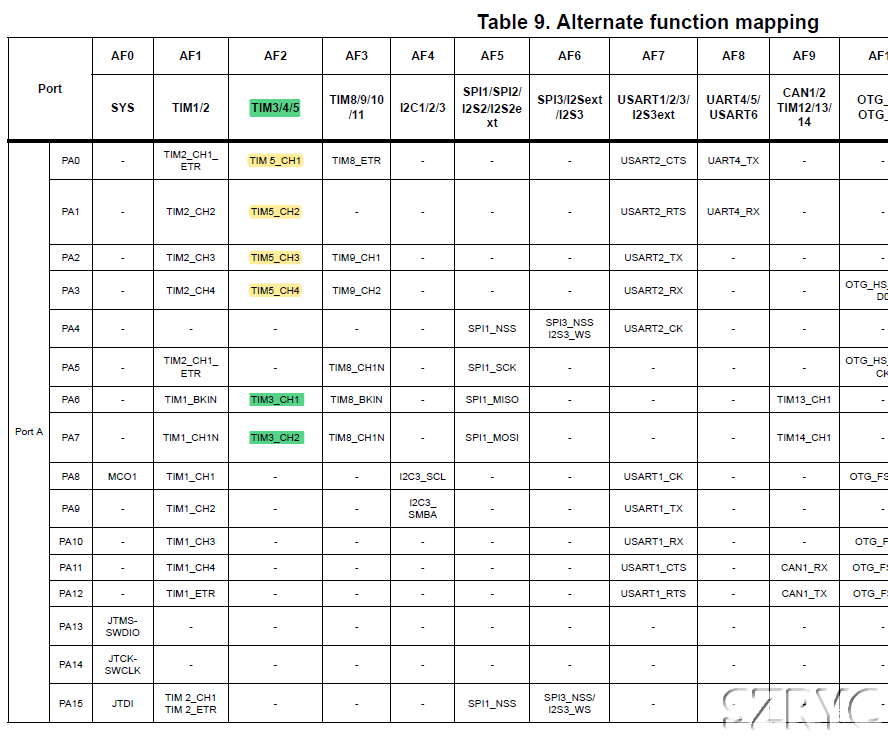
因此程序中對A0引腳可以這樣配置,注意一定要配置引腳的復(fù)用功能:
GPIO_InitTypeDef GPIO_InitStructure; /*GPIO 結(jié)構(gòu)體*/ RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //使能PORTA時(shí)鐘 /*輸入信號的GPIO初始化*/ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIOA0 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; /*復(fù)用功能*/ GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽復(fù)用輸出 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN; /*下拉*/ GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA0 GPIO_PinAFConfig(GPIOA,GPIO_PinSource0,GPIO_AF_TIM5); //PA0復(fù)用位定時(shí)器5
使用定時(shí)器,時(shí)基初始化是必不可少的,就是要設(shè)置一些計(jì)數(shù)的頻率與溢出值(自動(dòng)重裝載值):
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; /*時(shí)基 結(jié)構(gòu)體*/ /*時(shí)基初始化*/ TIM_TimeBaseStructure.TIM_Period=arr; /* 自動(dòng)重裝載值 */ TIM_TimeBaseStructure.TIM_Prescaler=psc; /* 定時(shí)器分頻 */ TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上計(jì)數(shù)模式 TIM_TimeBaseInit(TIM5,&TIM_TimeBaseStructure);
將定時(shí)器的通道1設(shè)置為輸入捕獲模式:
TIM_ICInitTypeDef TIM5_ICInitStructure; /*輸入通道 結(jié)構(gòu)體*/ /*輸入通道初始化,初始化TIM5輸入捕獲參數(shù)*/ TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1; //CC1S=01 選擇輸入端 IC1映射到TI1上 TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; /* 上升沿捕獲 */ TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI1上 TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置輸入分頻,不分頻 TIM5_ICInitStructure.TIM_ICFilter = 0x00; //IC1F=0000 配置輸入濾波器 不濾波 TIM_ICInit(TIM5, &TIM5_ICInitStructure); TIM_ITConfig(TIM5,TIM_IT_Update|TIM_IT_CC1,ENABLE); /* 允許更新(溢出)中斷 ,允許CC1IE捕獲中斷 */ TIM_Cmd(TIM5,ENABLE ); //使能定時(shí)器5
關(guān)于配置CCMR1、CCER寄存器
CCMR1:
CCER:
TIM_ICInit函數(shù)對應(yīng)于輸入通道的初始化,其實(shí)就是操作CCMR1、CCER寄存器:
void TIM_ICInit(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct) { if (TIM_ICInitStruct->TIM_Channel == TIM_Channel_1) { /* TI1 配置 */ TI1_Config(TIMx, TIM_ICInitStruct->TIM_ICPolarity, TIM_ICInitStruct->TIM_ICSelection, TIM_ICInitStruct->TIM_ICFilter); /* 設(shè)置中斷捕獲預(yù)分頻值 */ TIM_SetIC1Prescaler(TIMx, TIM_ICInitStruct->TIM_ICPrescaler); } else if (TIM_ICInitStruct->TIM_Channel == TIM_Channel_2) { /*省略...*/ } } static void TI1_Config(TIM_TypeDef* TIMx, uint16_t TIM_ICPolarity, uint16_t TIM_ICSelection,uint16_t TIM_ICFilter) { uint16_t tmpccmr1 = 0, tmpccer = 0; /* 關(guān)閉通道1: 復(fù)位CC1E位 */ TIMx->CCER &= (uint16_t)~TIM_CCER_CC1E; tmpccmr1 = TIMx->CCMR1; tmpccer = TIMx->CCER; /* 通過設(shè)置CC1S選擇為輸入模式, 并配置濾波器 */ tmpccmr1 &= ((uint16_t)~TIM_CCMR1_CC1S) & ((uint16_t)~TIM_CCMR1_IC1F); tmpccmr1 |= (uint16_t)(TIM_ICSelection | (uint16_t)(TIM_ICFilter << (uint16_t)4)); /* 選擇CC1P極性并設(shè)置CC1E位 */ tmpccer &= (uint16_t)~(TIM_CCER_CC1P | TIM_CCER_CC1NP); tmpccer |= (uint16_t)(TIM_ICPolarity | (uint16_t)TIM_CCER_CC1E); /* 寫數(shù)據(jù)到 TIMx 的CCMR1 和 CCER 寄存器 */ TIMx->CCMR1 = tmpccmr1; TIMx->CCER = tmpccer; } void TIM_SetIC1Prescaler(TIM_TypeDef* TIMx, uint16_t TIM_ICPSC) { TIMx->CCMR1 &= (uint16_t)~TIM_CCMR1_IC1PSC; /* 復(fù)位IC1PSC位 */ TIMx->CCMR1 |= TIM_ICPSC; /* 設(shè)置IC1PSC值 */ }
關(guān)于配置DIER寄存器
TIM_ITConfig函數(shù)對于中斷的開啟,其實(shí)就是操作DIER寄存器:
void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState) { if (NewState != DISABLE) { /* 使能中斷 */ TIMx->DIER |= TIM_IT; } else { /* 失能中斷 */ TIMx->DIER &= (uint16_t)~TIM_IT; } }
定時(shí)器中斷的使能設(shè)置已在上面的定時(shí)器配置中設(shè)置,這里只是進(jìn)行常規(guī)的配置定時(shí)器中斷的優(yōu)先級:
/*定時(shí)器中斷配置*/ NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2; //搶占優(yōu)先級3 NVIC_InitStructure.NVIC_IRQChannelSubPriority =0; //子優(yōu)先級3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根據(jù)指定的參數(shù)初始化NVIC寄存器
此處用到了兩個(gè)全局變量,用于輔助實(shí)現(xiàn)高電平捕獲。其中:
TIM5CH1_CAPTURE_VAL用來記錄捕獲到下降沿的時(shí)候 TIM5_CNT的值。
TIM5CH1_CAPTURE_STA用來記錄捕獲狀態(tài),我們把它當(dāng)成一個(gè)寄存器那樣來使用 。其各位描述下:

u8 TIM5CH1_CAPTURE_STA=0; //輸入捕獲狀態(tài)(當(dāng)中一個(gè)自制的寄存器使用,初始為0) u32 TIM5CH1_CAPTURE_VAL; //輸入捕獲值(TIM2/TIM5是32位) /** * @brief 定時(shí)器5中斷服務(wù)程序 */ void TIM5_IRQHandler(void) { if((TIM5CH1_CAPTURE_STA&0X80)==0)//還未成功捕獲 (1000 0000) { /*定時(shí)器溢出中斷*/ if(TIM_GetITStatus(TIM5, TIM_IT_Update) != RESET) { if(TIM5CH1_CAPTURE_STA&0X40)/* 之前標(biāo)記了開始信號(0100 0000) */ { if((TIM5CH1_CAPTURE_STA&0X3F)==0X3F) /* 高電平太長了,計(jì)數(shù)溢出了 (0011 1111) */ { TIM5CH1_CAPTURE_STA|=0X80; /* (強(qiáng)制)標(biāo)記成功捕獲了一次 (1000 0000) */ TIM5CH1_CAPTURE_VAL=0XFFFFFFFF; /* 因?yàn)橐绯龃螖?shù)N不能再加了,就將當(dāng)前的捕獲值設(shè)置為32位的最大值,等效Nmax+1*/ } else /* 正常情況是不會溢出,最終得出正確的高電平時(shí)間 */ { TIM5CH1_CAPTURE_STA++; /* 累計(jì)定時(shí)器溢出次數(shù)N */ } } else { /* 還沒有捕獲到信號時(shí),定時(shí)器溢出后什么也不做,自己清零繼續(xù)計(jì)數(shù)即可 */ } } /*捕獲1發(fā)生捕獲事件*/ if(TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET) { /*捕獲到一個(gè)下降沿(結(jié)束信號)*/ if(TIM5CH1_CAPTURE_STA&0X40) /* 之前標(biāo)記了開始信號(0100 0000) */ { TIM5CH1_CAPTURE_STA|=0X80; /* 標(biāo)記成功捕獲到一次高電平脈寬 (1000 0000) */ TIM5CH1_CAPTURE_VAL=TIM_GetCapture1(TIM5); /* 獲取當(dāng)前的捕獲值 */ TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising); /* CC1P=0 重新設(shè)置為上升沿捕獲,用于下次捕捉信號 */ } /*還未開始,第一次捕獲 上升沿(起始信號) */ else { TIM5CH1_CAPTURE_STA=0; /* 清空 捕獲狀態(tài)寄存器 */ TIM5CH1_CAPTURE_VAL=0; /* 清空 捕獲值 */ TIM5CH1_CAPTURE_STA|=0X40; /* 標(biāo)記捕獲到了上升沿 (0100 0000) */ TIM_Cmd(TIM5,DISABLE ); /* 關(guān)閉定時(shí)器5 */ TIM_SetCounter(TIM5,0); /* 清空CNT,重新從0開始計(jì)數(shù) */ TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Falling); /* CC1P=1 設(shè)置為下降沿捕獲 */ TIM_Cmd(TIM5,ENABLE ); /* 使能定時(shí)器5 */ } } } TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update); //清除中斷標(biāo)志位 }
再來對比一下這張圖:
初始化時(shí)設(shè)置為上升沿觸發(fā),觸發(fā)后(起始信號),清空CNT,重新從0開始計(jì)數(shù),并設(shè)置為下降沿捕獲
在之后的過程中可能會有多次定時(shí)器計(jì)數(shù)溢出,即TIM5CH1_CAPTURE_STA++(使用低6位),也即N的值
最后捕捉到下降沿(結(jié)束信號),TIM5CH1_CAPTURE_VAL獲取當(dāng)前CNT的值,也即CCRx2的值
再看主函數(shù)中:
while(1) { /* 成功捕獲到了一次高電平 (1000 0000) */ if(TIM5CH1_CAPTURE_STA&0X80) { temp=TIM5CH1_CAPTURE_STA&0X3F; /* 獲取溢出的次數(shù)N (0011 1111) */ temp*=0XFFFFFFFF; /* 溢出時(shí)間總和 = N*溢出計(jì)數(shù)值 */ temp+=TIM5CH1_CAPTURE_VAL; /* 總的高電平時(shí)間 = 溢出時(shí)間總和 + 下降沿時(shí)的計(jì)數(shù)值*/ printf("HIGH:%lld us\r\n",temp); //打印總的高點(diǎn)平時(shí)間 TIM5CH1_CAPTURE_STA=0; //開啟下一次捕獲 } }
當(dāng)檢查TIM5CH1_CAPTURE_STA為捕獲到1次高電平后,打印高電平的持續(xù)時(shí)間:
總的高電平時(shí)間 =N(TIM5CH1_CAPTURE_STA的低6位) * ARR(溢出計(jì)數(shù)值)+ CCRx2(下降沿時(shí)的計(jì)數(shù)值)
附:一些寄存器簡寫的全稱
ARR:auto-reload register 自動(dòng)重載寄存器
CCR:capture/compare register 捕獲/比較寄存器
PSC:prescaler 預(yù)分頻器
CNT:counter 計(jì)數(shù)器
SR:status register 狀態(tài)寄存器
CCMR:capture/compare mode register 捕獲/比較模式寄存器
CC1S:Capture/Compare 1 selection 捕獲/比較1模式選擇
OC1M: Output compare 1 mode 輸出比較1模式
OC1PE:Output compare 1 preload enable 輸出比較1預(yù)裝載使能
IC1F:Input capture 1 filter 輸入捕獲1濾波器
IC1PSC:Input capture 1 prescaler 輸入捕獲1預(yù)分頻器
CCER:capture/compare enable register 捕獲/比較使能寄存器
CC1P:Capture/Comparex output Polarity 捕獲 /比較1輸出極性
CC1E:Capture/Comparex output enable 捕獲 /比較1輸出使能
SMCR:slave mode control register 從模式控制寄存器
DCR:DMA control register DMA 控制寄存器
DIER:DMA/Interrupt enable register DMA/中斷使能寄存器
DMAR:DMA address for full transfer 全傳輸 DMA 地址
OR:option register 選項(xiàng)寄存器
<b id="0toem"><menuitem id="0toem"></menuitem></b>
<code id="0toem"><abbr id="0toem"></abbr></code>
<code id="0toem"></code>

